Zestaw DIY do samodzielnego montażu robota kroczącego C51 do nauki i edukacji
Przegląd produktów
Model produktu: WK-56-32
Nazwa produktu: Zestaw do samodzielnego montażu robota kroczącego
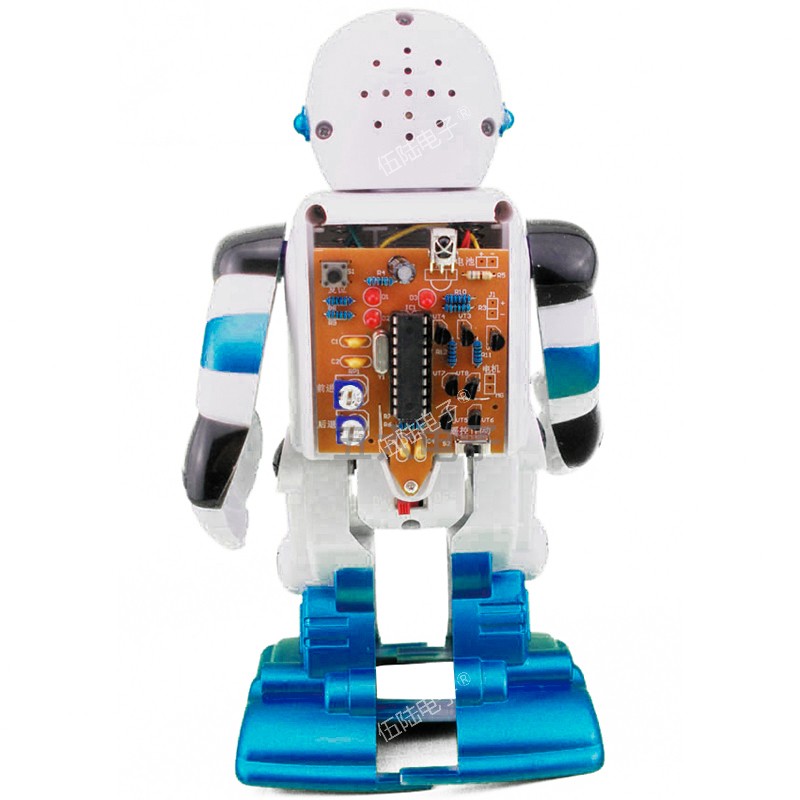
Zabawny i edukacyjny zestaw do samodzielnego montażu robota kroczącego oparty na mikrokontrolerze STC11F02 (seria C51). Posiada funkcje ruchu do przodu/do tyłu, migające oczy LED, efekty dźwiękowe i zdalne sterowanie na podczerwień. Zawiera wszystkie komponenty, schematy obwodów i wstępnie zaprogramowany MCU. Wymaga lutowania i montażu. Idealny do nauki sterowania mikrokontrolerem, podstaw robotyki i umiejętności lutowania. Świetna zabawka i prezent.
Ten zestaw 51 robotów kroczących z mikrokontrolerem wykorzystuje mikrokontroler do sterowania, umożliwiając robotowi poruszanie się do przodu, do tyłu, miganie oczami i wydawanie dźwięków. Posiada również funkcję zdalnego sterowania na podczerwień. Produkt ten jest zestawem wprowadzającym do nauki technologii sterowania mikrokontrolerami i robotyki.
Zestaw zawiera wszystkie niezbędne komponenty, schematy obwodów, płytki drukowane i pilota zdalnego sterowania, a mikrokontroler jest już zaprogramowany. Nabywcy muszą go jedynie przylutować i zmontować, aby działał prawidłowo. Aby ułatwić naukę, dostarczamy również instrukcję obsługi i kod źródłowy mikrokontrolera.
Ten produkt jest odpowiedni dla entuzjastów elektroniki i studentów do montażu i nauki. Po zmontowaniu stanowi również świetną zabawkę i idealny prezent dla dzieci!
Kluczowe specyfikacje
- Model produktu: WK-56-32
- Nazwa produktu: Zestaw do samodzielnego montażu robota kroczącego
- Mikrokontroler: STC11F02 (seria C51 / 8051) - podstawowy 51 MCU szeroko stosowany w edukacji
- Tryby sterowania: Tryb automatyczny + tryb zdalnego sterowania na podczerwień (przełącznik S2 do wyboru)
- Silniki: 2x silniki DC ze sterowaniem do przodu/do tyłu
- Układ napędowy: Układ tranzystorów (VT3-VT8) tworzący konfigurację mostka H
- Regulacja: 2x potencjometry (RP1, RP2) do sterowania taktowaniem do przodu i do tyłu
- Wskaźniki: 3x programowalne diody LED (D1, D2, D3)
- Efekty głowicy: Dźwięk + światło (sterowane tranzystorem VT1)
- Odbiornik podczerwieni: Moduł HW (w zestawie)
- Pilot zdalnego sterowania: Pilot na podczerwień w zestawie
- Przełącznik funkcji: S2 przełącza między trybami automatycznym i zdalnego sterowania
- Przycisk resetowania: S1 (reset mikrokontrolera)
- Zasilanie: 3x baterie AA (brak w zestawie)
- Programowanie: Wstępnie zaprogramowany MCU; dostarczony kod źródłowy do nauki
- W zestawie: Wszystkie komponenty, płytka drukowana, pilot zdalnego sterowania, dokumentacja, elementy korpusu robota
Opis produktu
Zestaw robota kroczącego WK-56-32 to wciągające wprowadzenie do robotyki opartej na mikrokontrolerach. Zbudowany w oparciu o popularny MCU STC11F02 (seria C51), ten chodzący robot może poruszać się do przodu / do tyłu, migać oczami, wydawać dźwięki i być sterowany za pomocą pilota na podczerwień - a wszystko to przy jednoczesnym nauczaniu podstawowych koncepcji wbudowanego sterowania.
Podstawowa technologia
- Mikrokontroler STC11F02: Podstawowy 51 MCU szeroko stosowany w aplikacjach edukacyjnych.
- Tranzystorowy obwód sterujący (VT3-VT8): Tworzy mostek H do sterowania kierunkiem silnika. Gdy P16 jest wysoki, a P15 niski, VT7 przewodzi, VT4 i VT5 przewodzą - silnik obraca się w jednym kierunku. Gdy P16 niski i P15 wysoki, VT8 przewodzi, VT3 i VT6 przewodzą - silnik obraca się w przeciwnym kierunku.
- Pilot zdalnego sterowania na podczerwień: Dołączony pilot umożliwia bezprzewodową obsługę za pomocą wielu przycisków sterujących.
- Regulacja czasu: Potencjometry kontrolują czas trwania do przodu/do tyłu poprzez pomiar czasu ładowania kondensatora.
Objaśnienie zasady działania
Ten obwód wykorzystuje mikrokontroler STC11F02. W obwodzie, tranzystory VT3-VT8 razem tworzą obwód napędowy dla silników robota kroczącego. Podstawy VT7 i VT8 są podłączone odpowiednio do portów I/O mikrokontrolera P16 i P15. Kontrolując dodatnie i ujemne połączenia silnika oraz program mikrokontrolera, można elastycznie sterować ruchami robota do przodu i do tyłu.
Kontrola opóźnienia
Czasy ruchu robota do przodu i do tyłu są kontrolowane przez dwa regulowane rezystory na płytce drukowanej, każdy połączony szeregowo z monolitycznym kondensatorem 1µF. Z pomocą mikrokontrolera czas ładowania kondensatora monolitycznego jest mierzony i przekształcany w czas opóźnienia do sterowania ruchami robota do przodu i do tyłu. Większa wartość rezystancji skutkuje dłuższym czasem ładowania i odwrotnie.
Efekty głowicy
Tranzystor VT1 kontroluje dźwięk i światło emitowane z głowy robota. Czerwony przewód jest podłączony do zacisku "+" złącza J1, a czarny przewód do zacisku "-". Port I/O P17 mikrokontrolera jest podłączony do podstawy VT1. Gdy P17 wysyła niski poziom, tranzystor przewodzi, a głowa robota emituje dźwięk i światło. Gdy P17 wyprowadza wysoki poziom, VT1 jest odcinany.
Możliwość rozbudowy
Diody LED D1, D2 i D3 są podłączone odpowiednio do portów I/O mikrokontrolera P30, P31 i P34. Te zajęte przez diody LED porty I/O mogą być również wykorzystane do rozszerzenia funkcjonalności. Na przykład, można je wykorzystać do podłączenia ultradźwiękowych modułów unikania przeszkód lub modułów unikania przeszkód na podczerwień. Wystarczy usunąć niektóre diody LED i przedłużyć przewody z ujemnych zacisków diod LED, aby podłączyć żądane moduły funkcjonalne, a następnie napisać niestandardowe programy.
Tryby pracy (za pomocą przełącznika S2)
- Tryb automatyczny: Po włączeniu zasilania z S2 w pozycji automatycznej, robot kroczący automatycznie dostosowuje swój ruch do przodu i do tyłu zgodnie z wartościami RP1 i RP2. Podczas ruchu do przodu, dioda LED D1 świeci się, a głowa robota emituje dźwięk i światło; podczas ruchu do tyłu, dioda LED D2 świeci się, a dźwięk/światło wyłącza się. Regulacja RP1 i RP2 zmienia czas ruchu do przodu/do tyłu.
- Tryb zdalnego sterowania: Przełącz S2 do pozycji zdalnego sterowania i uruchom ponownie - włącza funkcję zdalnego sterowania na podczerwień. Za pomocą dołączonego pilota na podczerwień można sterować robotem, aby poruszał się do przodu, do tyłu i zatrzymywał się. Dźwięk/światło głowy może być kontrolowane, a stan każdej diody LED może być kontrolowany indywidualnie.
Cechy i korzyści
- Rdzeń mikrokontrolera C51: STC11F02 - idealny do nauki programowania 8051 i sterowania wbudowanego.
- Ruch robota kroczącego: Ruch do przodu i do tyłu z regulacją czasu za pomocą potencjometrów.
- Pilot na podczerwień: Dołączony pilot do bezprzewodowej obsługi z wieloma przyciskami funkcyjnymi.
- Tryb automatyczny: Robot chodzi autonomicznie z niezależnie regulowanym czasem ruchu do przodu/do tyłu.
- Efekty dźwiękowe i świetlne: Głowa emituje dźwięk i miga podczas ruchu do przodu - angażująca wizualna informacja zwrotna.
- Diody LED stanu: 3 programowalne diody LED (D1, D2, D3) do wskazywania i rozszerzania.
- Regulowany czas: Dwa potencjometry (RP1, RP2) kontrolują czas trwania ruchu do przodu i do tyłu poprzez pomiar ładowania kondensatora.
- Wstępnie zaprogramowany MCU: Gotowy do użycia po montażu - nie wymaga programowania do podstawowej obsługi.
- Dostarczony kod źródłowy: Możliwość nauki i modyfikacji w celu uzyskania niestandardowych zachowań - świetne rozwiązanie dla edukacji.
- Możliwość rozbudowy: Dostępne porty I/O do dodawania czujników, takich jak ultradźwiękowe lub podczerwone moduły unikania przeszkód.
- Kompletny zestaw: Zawiera wszystkie komponenty, płytkę PCB, pilota, części robota i dokumentację.
- Wartość edukacyjna: Dowiedz się więcej o sterowaniu silnikiem, sterownikach tranzystorów mostka H, pomiarze czasu RC i komunikacji na podczerwień.
- Wyjaśnienie kontroli opóźnienia: Unikalna możliwość nauczania - zrozumienie, w jaki sposób czas ładowania kondensatora tworzy programowalne opóźnienia.
- Obwód resetowania: Kondensator C3 i rezystor R4 tworzą obwód resetowania opóźnienia włączenia; S1 to reset ręczny.
Funkcje zdalnego sterowania
| Klawisz | Funkcja |
|---|
| 1, 2, 3 | Kontrolka LED D3 (świeci, gaśnie, miga) |
| 4, 5, 6 | Dioda kontrolna D1 (świeci, gaśnie, miga) |
| 7, 8, 9 | Dioda kontrolna D2 (świeci, gaśnie, miga) |
| + | Robot porusza się do przodu |
| - | Ruch robota do tyłu |
| Menu | Włączanie/wyłączanie świateł głowy |
| OK (|>|) | Zatrzymaj robota |
| Czerwony Zasilanie | Wyłączenie wszystkich działań (odpowiednik wyłączenia zasilania) |
Zawartość opakowania
- 1x Główna płytka PCB (płytka drukowana)
- 1x Mikrokontroler STC11F02 (wstępnie zaprogramowany)
- 1x Pilot zdalnego sterowania na podczerwień
- 1x Moduł odbiornika podczerwieni (HW)
- 2x Silniki prądu stałego
- Tranzystory (VT1, VT3, VT4, VT5, VT6, VT7, VT8) - zestaw
- Diody LED (D1, D2, D3) - zestaw
- 2x potencjometry (RP1, RP2)
- Rezystory, kondensatory (w tym kondensatory monolityczne 1µF C5, itp.) - pełny zestaw
- 1x Oscylator kryształowy (Y1)
- Przełączniki dotykowe (reset S1, przełącznik trybu S2)
- Elementy dźwiękowe i świetlne głowicy (dla obwodu VT1)
- Przewody, złącza i elementy montażowe
- Styki i przewody baterii
- Części korpusu robota (głowica, tylna pokrywa, dźwignia kołysania itp.)
- Schemat obwodu i instrukcje montażu
- Dostęp do kodu źródłowego (do nauki)
Uwaga: baterie 3x AA nie wchodzą w skład zestawu.
Podsumowanie instrukcji montażu
- Sprawdź wszystkie komponenty zgodnie z listą komponentów. Przetestuj rezystory i tranzystory, aby upewnić się, że ich ilość jest prawidłowa.
- Podczas lutowania należy przestrzegać zasady lutowania najpierw mniejszych komponentów, następnie większych komponentów, a na końcu układów scalonych.
- Utrzymuj komponenty jak najbliżej płytki bazowej i unikaj nieprawidłowego włożenia komponentów.
- Po lutowaniu należy wielokrotnie sprawdzać, czy nie ma luźnych, fałszywych lub nieprawidłowych połączeń lutowniczych oraz czy nie ma zwarć spowodowanych nadmiarem lutu.
- Po zmontowaniu funkcjonalnej płytki drukowanej należy przylutować przewody silnika i zasilania. Należy również pamiętać o podłączeniu dwóch przewodów połączeniowych na płytce drukowanej.
- Otwórz tylną pokrywę robota, odlutuj przewody silnika wewnątrz i przylutuj dostarczone okablowanie do silnika. Podłącz czerwony przewód głowicy do J1 (+) i czarny przewód głowicy do J1 (-).
- Przylutuj kable zasilające: jeden do ujemnego bieguna akumulatora, jeden do jednego końca przełącznika.
- Poprowadź przewody silnika i zasilania przez otwór z tyłu. Przymocuj głowicę i dźwignię kołysania, a następnie załóż tylną pokrywę (upewnij się, że jest wystarczająco dużo miejsca na ruchome części, aby uniknąć zakleszczenia).
- Przylutuj przewody silnika do pola MG na płytce drukowanej. Przylutuj czerwony kabel zasilający do pada + baterii, a zielony kabel do pada - baterii.
- Zainstaluj 3 baterie AA. Zamontuj płytkę drukowaną poza bateriami, zabezpieczając ją śrubami z pokrywy baterii.
- Ustaw przełącznik w pozycji automatycznej, włącz zasilanie - robot powinien chodzić. Wyreguluj RP1 i RP2, aby zmienić czas jazdy do przodu/do tyłu.
Zastosowania
- Edukacja w zakresie robotyki: Nauka sterowania silnikami za pomocą mikrokontrolerów i systemów wbudowanych.
- Praktyka programowania C51: Studiowanie i modyfikowanie dostarczonego kodu źródłowego w celu uzyskania niestandardowych zachowań.
- Szkolenie z lutowania: Komponenty przewlekane z przejrzystym układem dla rozwoju umiejętności.
- Zabawka DIY: Zbuduj własnego interaktywnego robota kroczącego z pilotem zdalnego sterowania.
- Projekt na prezent: Idealny dla dzieci, studentów i hobbystów zainteresowanych robotyką.
- STEM Outreach: Wciągające wprowadzenie do robotyki i programowania.
- Eksperymenty rozszerzające: Dodaj czujniki do omijania przeszkód lub podążania za światłem za pomocą dostępnych portów I/O.
- Szkolenia dydaktyczne: Idealny do demonstracji w klasie i praktycznych laboratoriów elektronicznych.
Ważne uwagi
- Status zestawu DIY: Ten produkt jest sprzedawany jako zestaw niezmontowanych części. Wymaga lutowania i montażu.
- Baterie nie są dołączone: Do działania wymaga 3x baterii AA.
- Wstępnie zaprogramowany MCU: Mikrokontroler jest dostarczany z oprogramowaniem układowym robota kroczącego - gotowy do użycia po montażu. Dostarczony kod źródłowy do nauki i modyfikacji.
- Sekwencja montażu: Należy postępować zgodnie z instrukcjami - najpierw małe elementy, potem duże, a następnie układy scalone.
- Montaż mechaniczny: Upewnij się, że ruchome części mają wystarczająco dużo miejsca wewnątrz - unikaj zakleszczenia.
- Okablowanie: Zwróć szczególną uwagę na polaryzację silnika i przewodów zasilających.
- Poziom umiejętności: Średnio zaawansowany - wymaga dobrych umiejętności lutowania i identyfikacji komponentów.
- Pilot zdalnego sterowania: Pilot na podczerwień w zestawie - baterie do pilota nie są określone (zakładamy, że nie są dołączone).
- Przewody połączeniowe: Dwa przewody połączeniowe na płytce drukowanej muszą być podłączone.
- Sprawdź wszystkie połączenia lutowane pod kątem zimnych połączeń lub mostków przed podłączeniem zasilania.
- Należy przestrzegać prawidłowej orientacji układów scalonych, diod, tranzystorów i kondensatorów elektrolitycznych.
Dane techniczne
- MCU: STC11F02 (seria 51)
- Napęd silnika: Tranzystorowy mostek H (VT3-VT8)
- Kontrola taktowania: Ładowanie RC za pomocą potencjometrów i kondensatorów monolitycznych (1µF)
- Wskaźniki: 3x programowalne diody LED
- Efekty głowy: Dźwięk + światło kontrolowane przez VT1
- Pilot zdalnego sterowania: Podczerwień, w zestawie z wielofunkcyjną klawiaturą
- Zasilanie: 3x baterie AA (4,5 V)
- Kryształ: Y1 zapewnia zegar operacyjny
Podsumowanie
Zestaw WK-56-32 Walking Robot DIY Kit oferuje idealne połączenie zabawy i edukacji. Dzięki sterowaniu mikrokontrolerem C51, zdalnemu sterowaniu na podczerwień, regulowanym wzorcom chodzenia i efektom dźwiękowym / świetlnym, uczy podstawowych pojęć robotyki, jednocześnie budując zabawną zabawkę. Dołączony pilot, wstępnie zaprogramowany MCU i dostarczony kod źródłowy sprawiają, że jest to idealne rozwiązanie dla studentów, hobbystów i każdego, kto rozpoczyna swoją przygodę z robotyką opartą na mikrokontrolerach.